How it all started
So, it’s not a secret I’m a bit too much into planes and flying in general. I enjoy watching planes flying by and checking what kind of plane that is.
One of these days I was looking at Flightradar, as per usual, but then thought of something: would it not be cool if there was a thing that would physically point towards the closest plane and also pronounce its model? Absolutely yes!
I did forget about this project for some time due to other projects/university/[object Object], but I got reminded about it pretty randomly, and now it came back with an updated scope: along with planes flying by it should be able to track and film flying by satellites and planets. Now this is a challenging project idea if I’ve ever had one!
The working name for this project will be 「Star Finger」 as its main purpose is to point into the sky and no other reason at all
Research sub-questions
Before starting implementation, some things should be researched and established.
- What types of astronomical objects should the device be able to track?
- How many axis of freedom does the device need?
- Which origin should be used?
- What materials should be used for the device?
- What framework should be used for the project if any? (ROS, ROS 2)
- Which hardware device shall be used for control purposes? (MCU, Embedded Linux, etc.)
First prototype blueprint
Having some questions from above answered, I’ve made a little draft of the project along with a couple of its planned features and characteristics.
- The machine should have 2 axis of freedom: one axis for horizontal movement and one for vertical (the “pointer”)
- The horizontal axis should be controlled by a stepper motor, the vertical one possibly by a servomotor
Below you can see a napkin blueprint I’ve made:
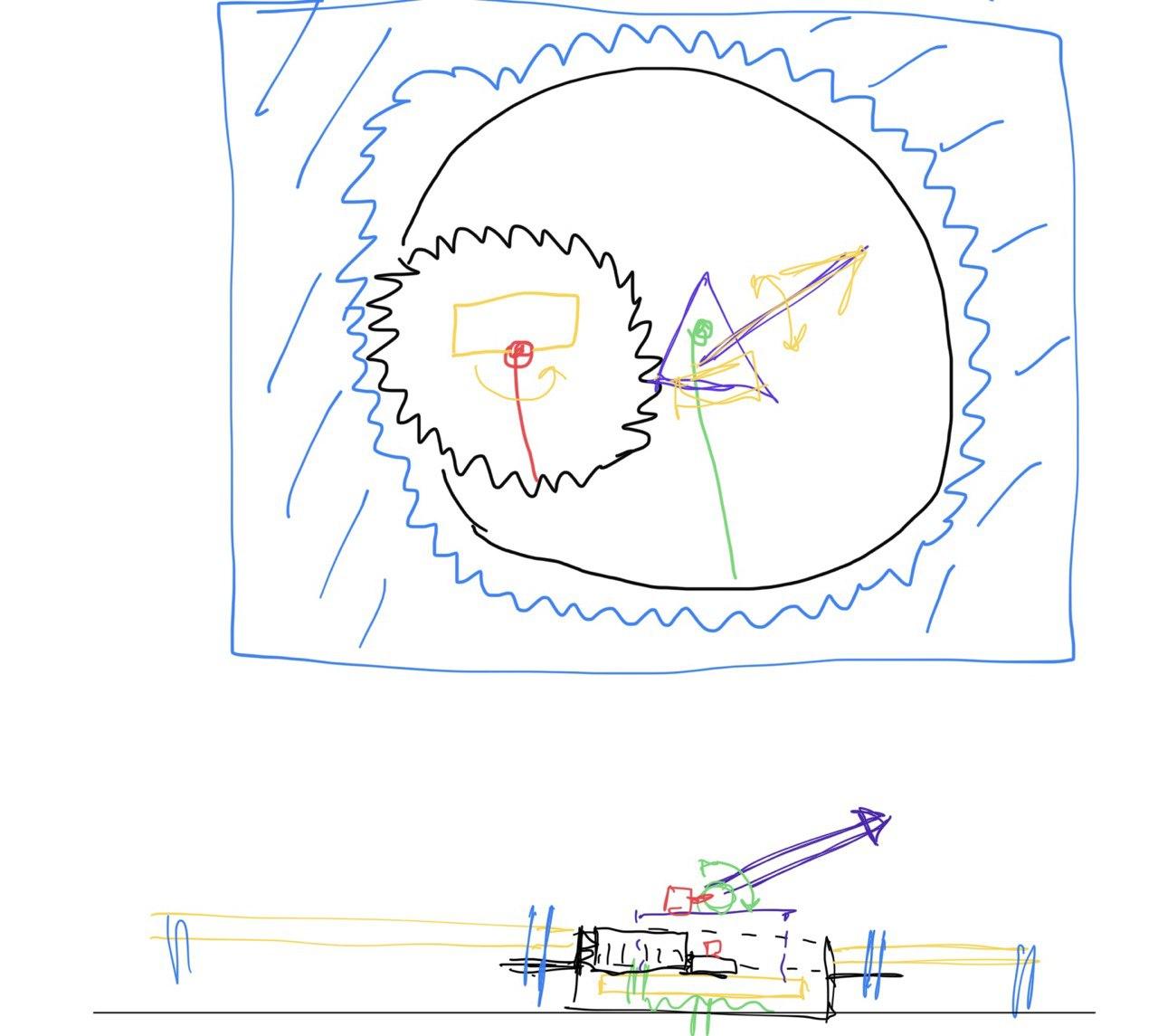
The internal gear on the picture is driven by a stepper motor. The ratio for the connection between the internal part with the payload and the stationary machine body will always be <1, therefore the motor will have precision in its rotational movement of the platform.
Astronomical bodies movement
I’ve found an interesting page that describes astronomical body position calculations pretty well. However, to not reinvent the wheel I might want to use the AstroPy library functionality along with pre-calculated de432s solar ephemerides.
For ISS, satellites and plane coordinates there are APIs available online. Useful resources: [1] [2] [3]
Current TODOs
- Make a CAD blueprint of the machine body
- Settle for the programming language and structure
- Do more research on possible origins and transformations between them
- Maybe make this page more beautiful